 March '10 Meeting Pics
March '10 Meeting PicsClick thumbnails for a larger view.

Bruce Shapiro brought his Egg Bots. They draw pictures on eggs with felt tip markers. www.egg-bot.com/ |

They look like this. |
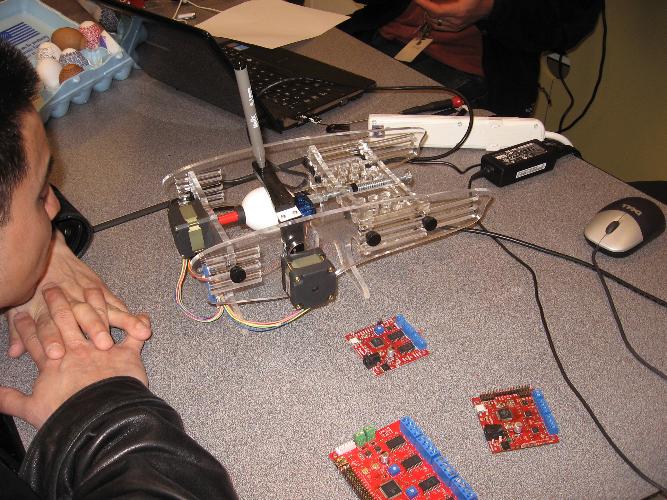
And like this. |

Bruce expaining how they work. |

Some eggs that were created. |

Close up of some eggs. |
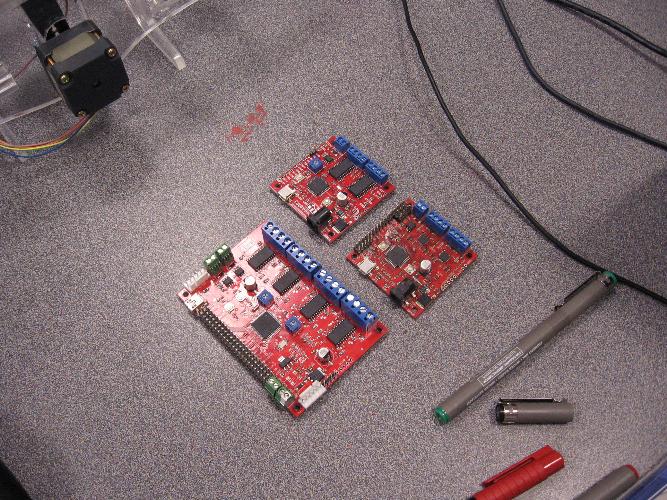
The egg plotters use controller boards that Brian Schmalz designed. Here are three different versions. www.schmalzhaus.com/ |

Close up of the boards. |
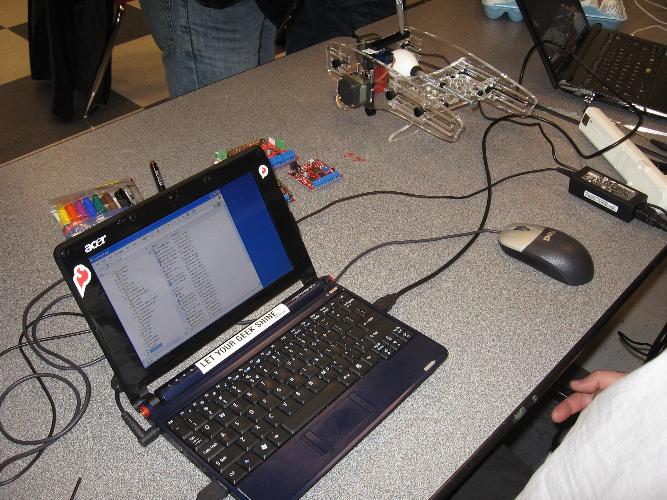
The Egg Bot is driven from a laptop computer. I think the code is written in Liberty Basic. |

Jeff Sampson's gyroscope test box. The Olimex board at the top just provides power and an RS232 convertor. |

Close up of the box. The tall skinny metal can is a Panasonic gyroscope. The fat square metal can is a Gyration gyroscope. The board missing from the big DIP socket was a Melexis gyroscope. |

Jeff Sampson's standardized processor board (on the left) and a custom 8 channel sonar board. |

The standardized processor on a custom IMU board. The IMU has a Melexis Gyroscope, a Sparkfun 5 axis IMU board and a barometric pressure sensor module. |
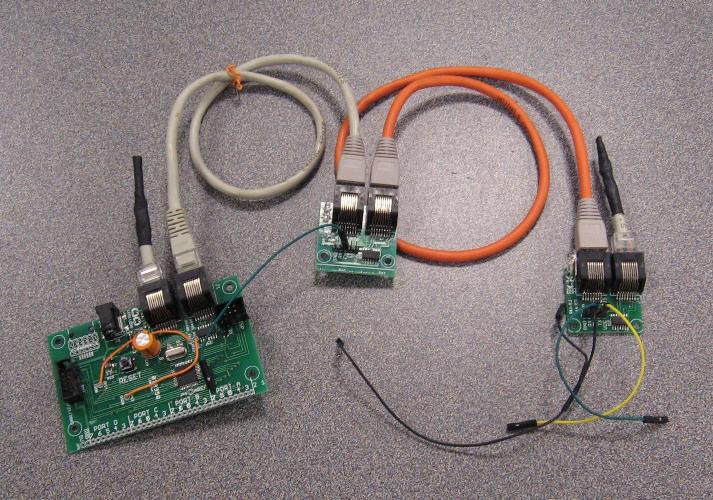
Here is a standardized processor board (which has my custom Robot Bus interface) connected to two other Robot Bus modules. The orange cable is a cross over which makes the module on the left the master. |
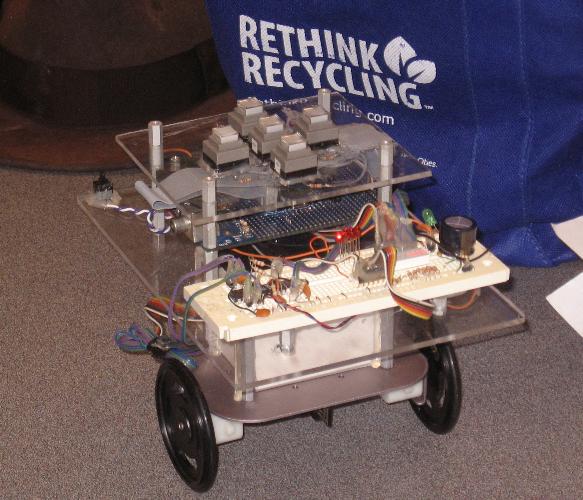
Kai and Lewis Dickson's robot. |

Jeff Sampson brought his motor controller project. It will eventually be a 3 or 4 channel motor controller that does PID control of each channel. It uses an Atmel XMega128A1 processor. |

Close up of the prototype. |

These two boards form the actual controller. I have a custom XMega prototyping board at the bottom. The top board has a small amount of logic and the motor and encoder connectors. |
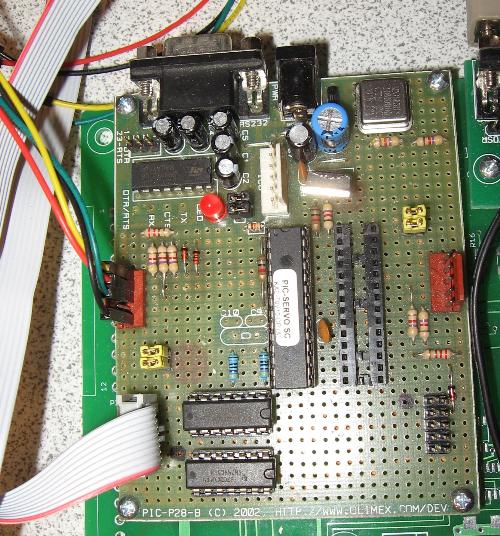
I also have the Olimex prototyping board that has two JRKerr PIC-ServoSC chips. I switch my motor back and forth from this controller to my controller to compare the performance. jrkerr.com/icproducts.html |