 December '03 Meeting Pics
December '03 Meeting PicsClick thumbnails for a larger view.

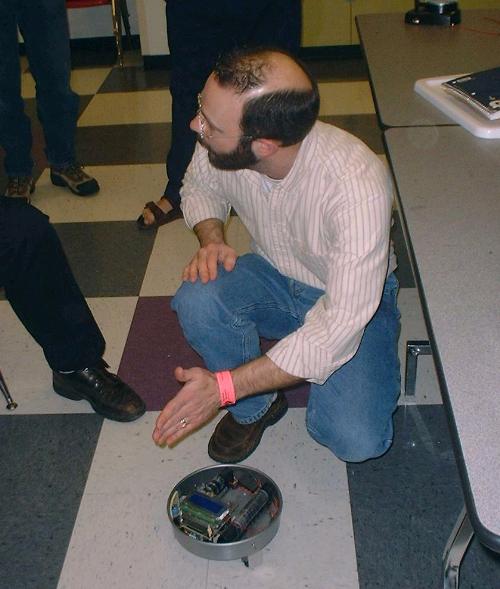
Peter Ellison made this new robot. It uses the Rabbit controller. Here is he giving a demo. |

It has a Polaroid sonar on the front to get range information. The sonar is mounted on an R/C servo. The small yellow pulleys on the wheels are for encoders. |

It uses DC gear motors for the main drive wheels. |

It uses drill batteries. |

Another view. |

Another view. |

Top view. You can see the Rabbit module on the carrier board. There is also a slave board and a motor driver board. |

The slave board has a Basic Stamp and an H-bridge driver board. It looks like this board is driving the R/C servo for the sonar. |

The dual H-bridge driver for the main motors. |

Jeff Sampson brought his engine/generator project. This is the front view. |

Back view. The starter relay is hanging on the wires on the left. |

The flywheel cover removed. |

Bill Arden gave a talk on his new demonstration project. |

He is making water based devices that will represent electronic devices. |
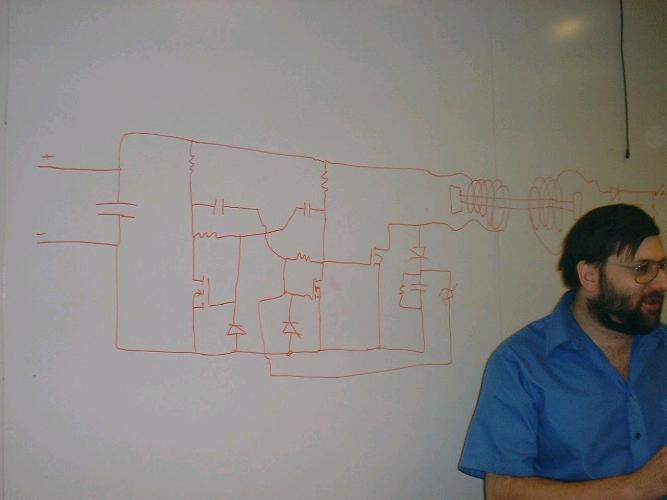
Bill is building a switching power suplly that runs on water pressure. So it has a square oscillator driving a transformer. The other side of the transformer has a rectifier and filter capacitor. |

This is his "MOSFET". |
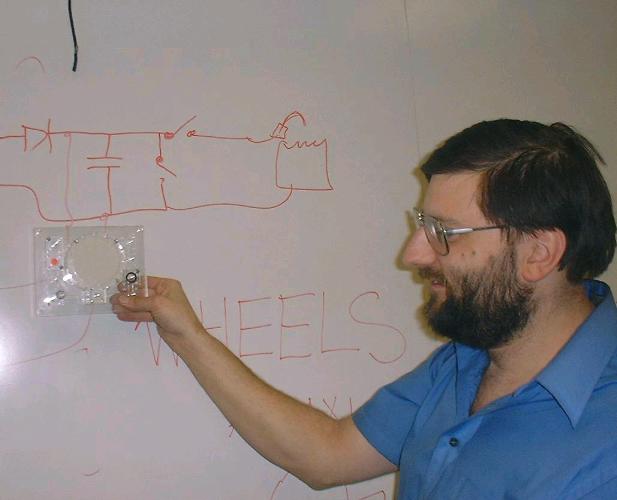
This is the output stage. It has a "capacitor" and a "diode" on a "PC board". All done with water. |

Alan Kilian describe his round stepper motor project. Just like Animanemone, but round. |

This is Alan's stepper motor circle, his Trippy robot and his Oscar robot. |
Alan is explaining the holonomic drive on his Trippy robot. |

Terry Schumacher explained his robot. It is a prototype for a lawn mower robot. |

Top view of robot. You can see a Mini RoboMind board, an LCD and two custom boards. |

Another view. |

Driving it around on the tether. |

Peter's robot and Terry's robot. |

Terry Schumacher brought in these two robot books. |

There was some discussion about ignition systems. |

And some talk about mapping. |

And Bill couldn't believe someone would put a complete battery charging system on the free pile. |